
Physics Actors and Shapes
Actor
static actor
dynamic actor
Trigger:触发器
Kinematic(No Physics Law) Actor:根据游戏需要进行运动
Actor Shapes
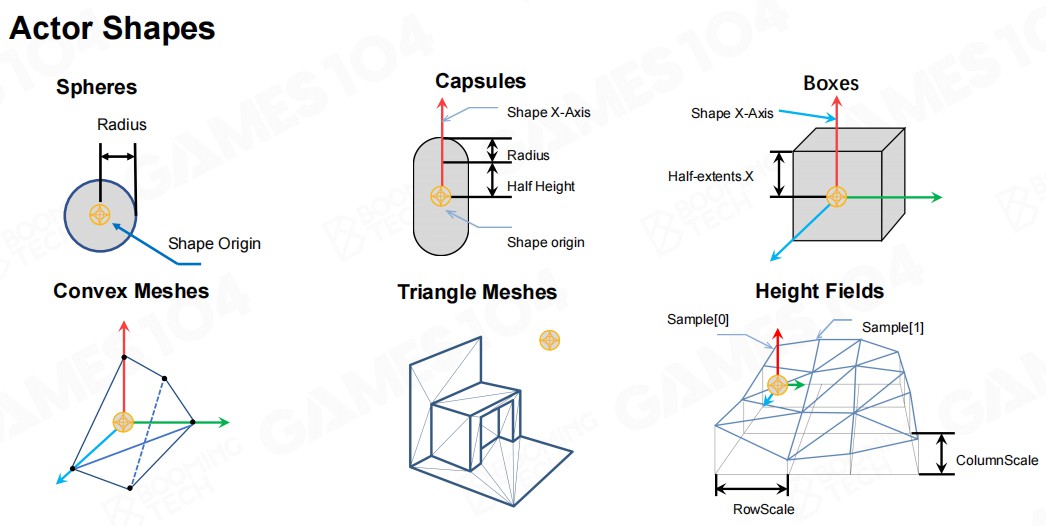
Soheres
Capsules:用于角色
Boxes
Convex Meshes:凸包多面体
Triangle Mesh:静态物体,动态的话开销会很大
Height Fields:用于地形
使用上面这些shapes将object包起来
Shape Properties:
Mass、Density
Center of Mass质心
Friction & Restitution摩擦力、弹力
Forces
Gravity、Drag、Friction
Impulse冲量(爆炸explosion center -> explosion impulse)
Movements
牛顿第一第二定律
Movement under Varying Force
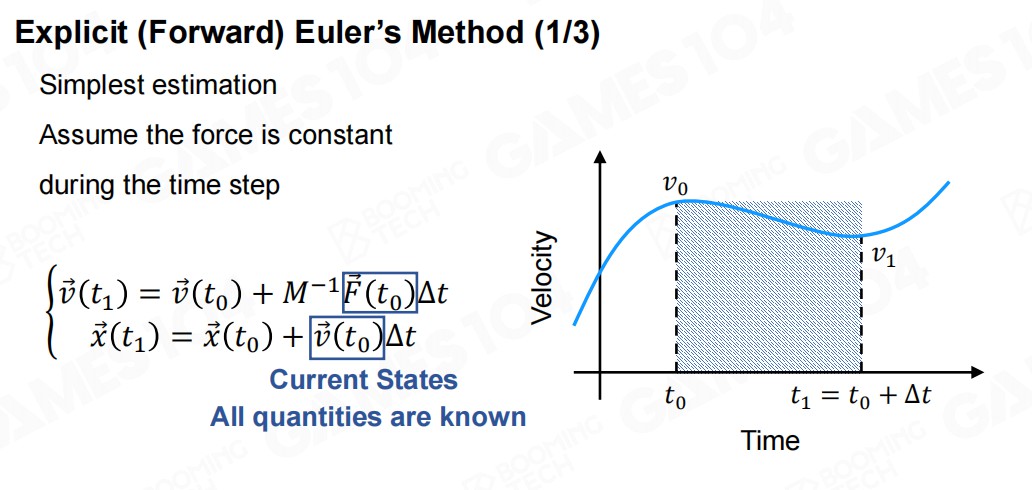
Time Integration
Explicit(Forward) Euler’s Method:显示欧拉积分,用当前的力算下一时刻的速度,用这一时刻的速度来计算下一个时刻的位置,问题就是积分过程是不收敛的,能量不守恒
![pFlTEKH.jpg]()
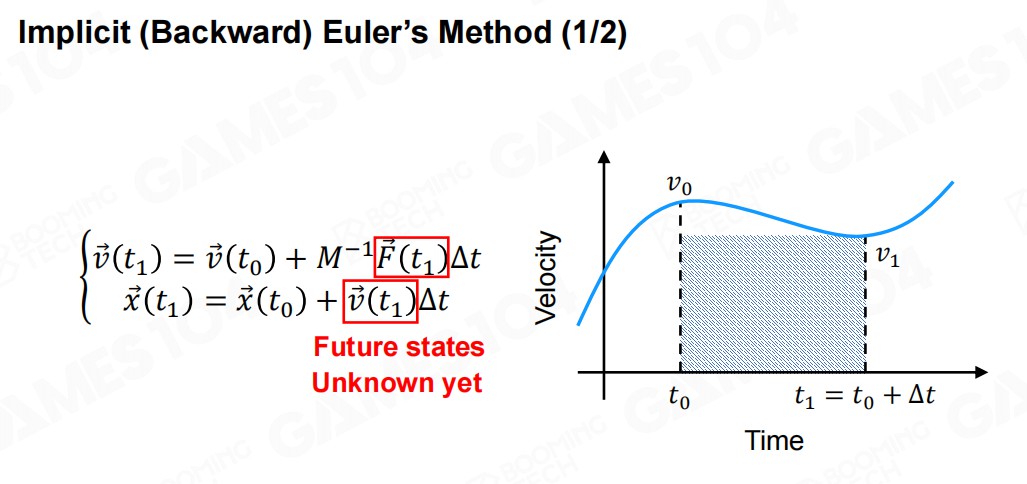
- Implicit(Backward)Euler’s Method:隐式欧拉法,用下一个时刻的力算出下一时刻的速度来计算下一个时刻的位置,但是能量会衰减。这是稳定的,并不会爆炸
![pFlT956.jpg]()
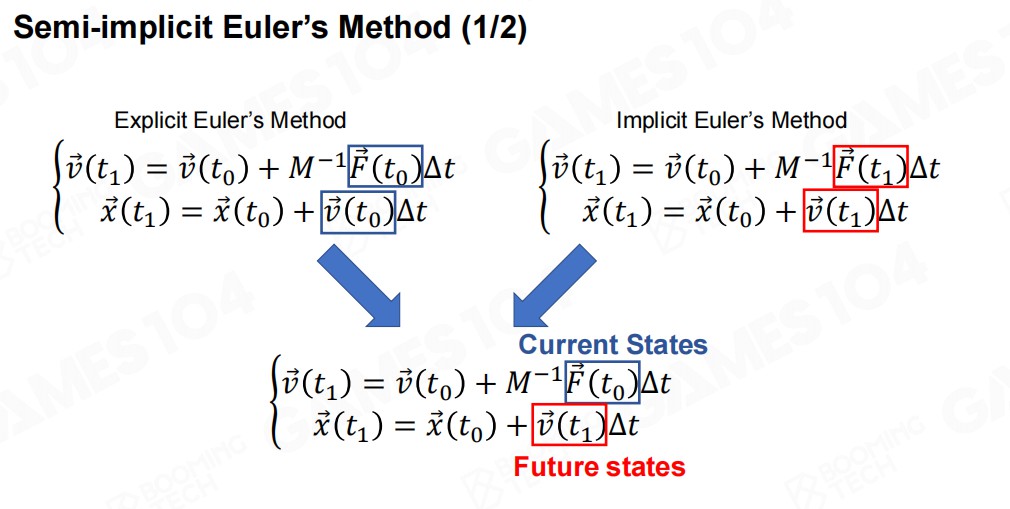
- Semi-implicit Euler‘s Method:半隐式欧拉法,用当前时刻的力计算下一时刻的速度,用下一时刻的速度计算下一时刻的位置,此时是假设这一时刻的力没有变化,稳定性高,计算效率高,但是在做简谐运动的时候,使用半隐式计算出来的周期会比ground truth的略长。目前这个方法是性价比最高的
![pFlTF2D.jpg]()
Rigid Body Dynamics
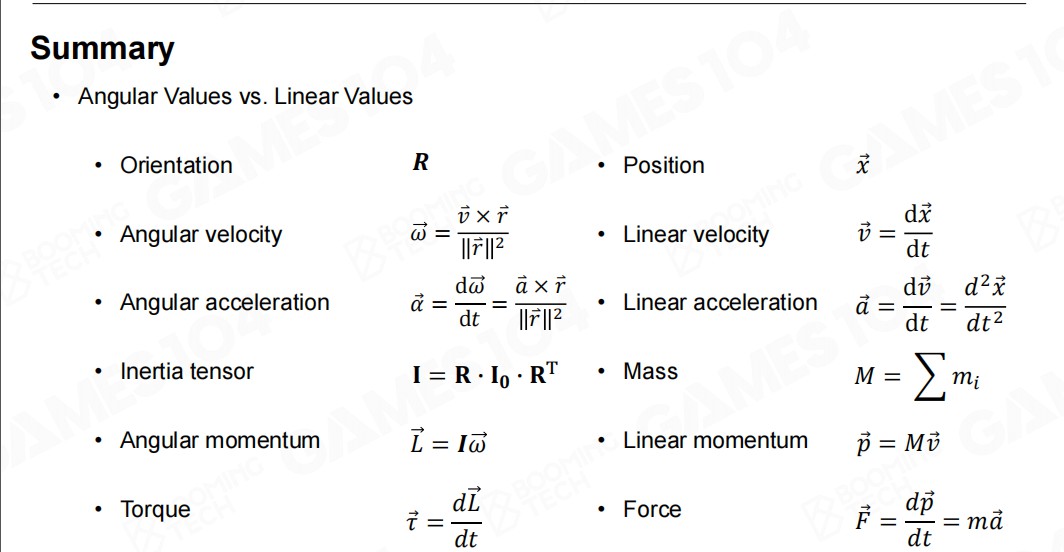
Particle Dynamics:质点动力学
Rigid Body Dynamics:刚体动力学
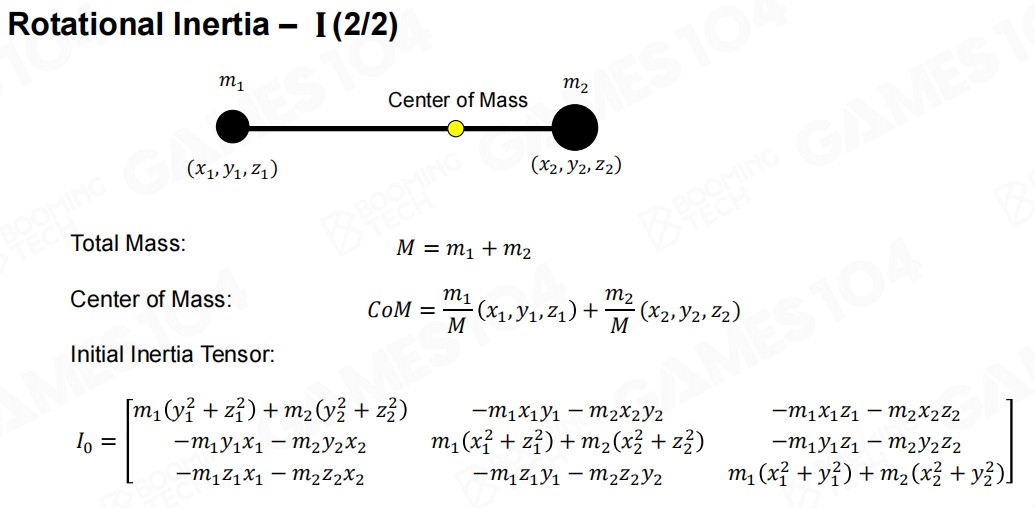
Rotational Inertia:转动惯量
Angular Momentum角动量,角动量守恒
Torque力矩
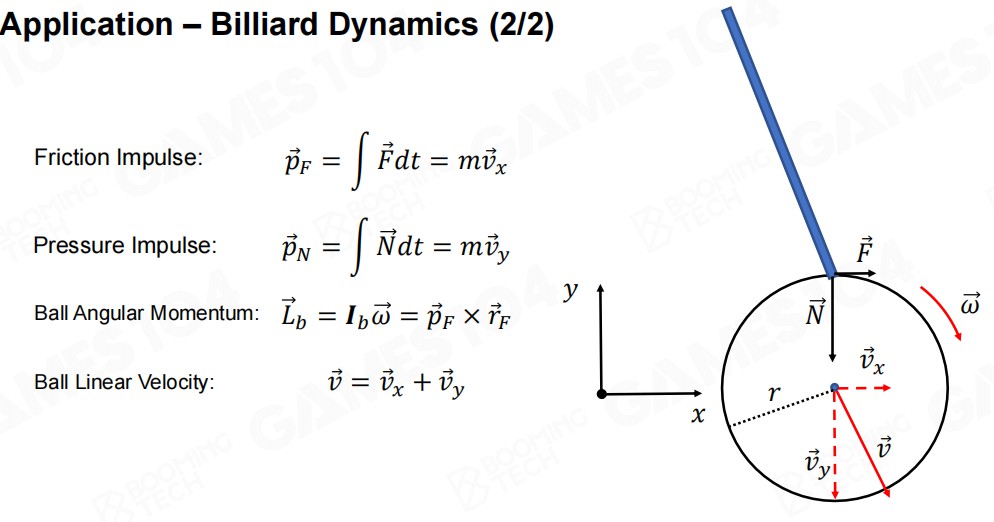
台球案例
Collision Detection
Two Phases
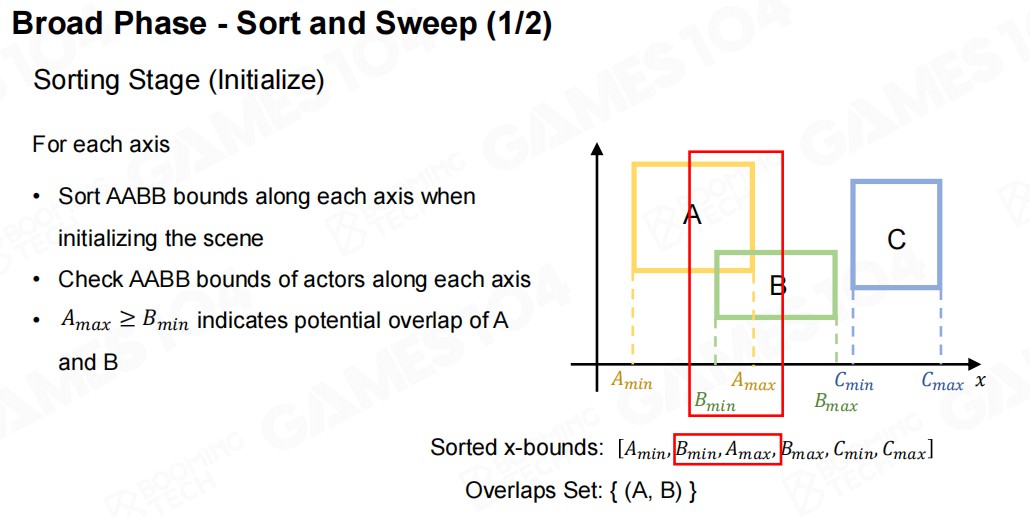
Broad Phase初筛
用AABB计算碰撞的可能性
BVH:当环境中的物体发生变化时,更新的成本非常低
Sort and Sweep:把每一个物体的bounding的每个轴的min和max排序,当至少两个轴产生交错的时候,就发现可能有交集;因为大量物体是不动的,所以只对局部会动的物体进行排序
Narrow Phase精细地判断
判断是否重叠
生成碰撞信息:估计橡胶的顶点、相交处的法线、相交的深度
Narrow Phase方案:
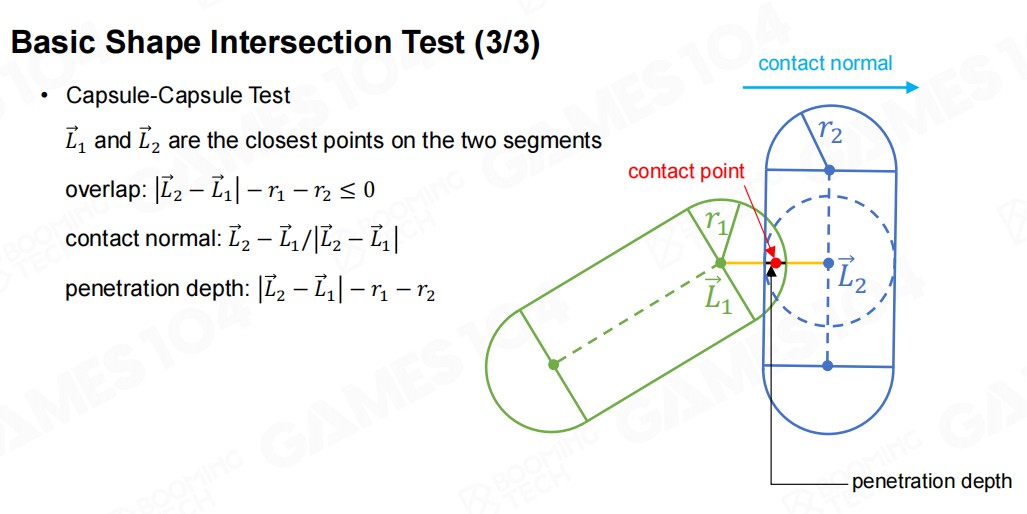
Basic Shape Intersection Test
球球相交,计算距离和两个球的半径和
胶囊和球相交、胶囊相交
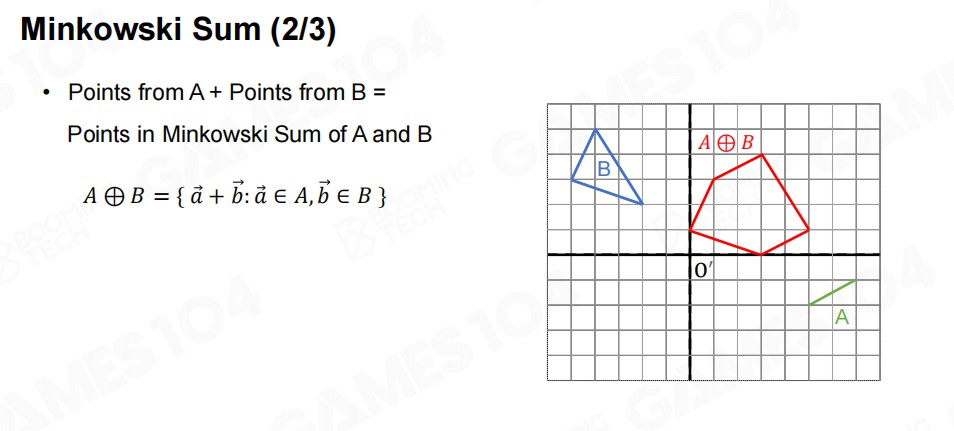
Minkowski Difference-based Methods
点集A+点集B会构造一个新的点集C
比如一个三角形点集B加了一个点A,得到新的点集就相当于三角形B加了一个位移
一个三角形点集B加了一条线点集A,得到新的点集相当于三角形B位移后相对于线进行了一个拖拽而形成了一个凸包
![pF1FVy9.jpg]()
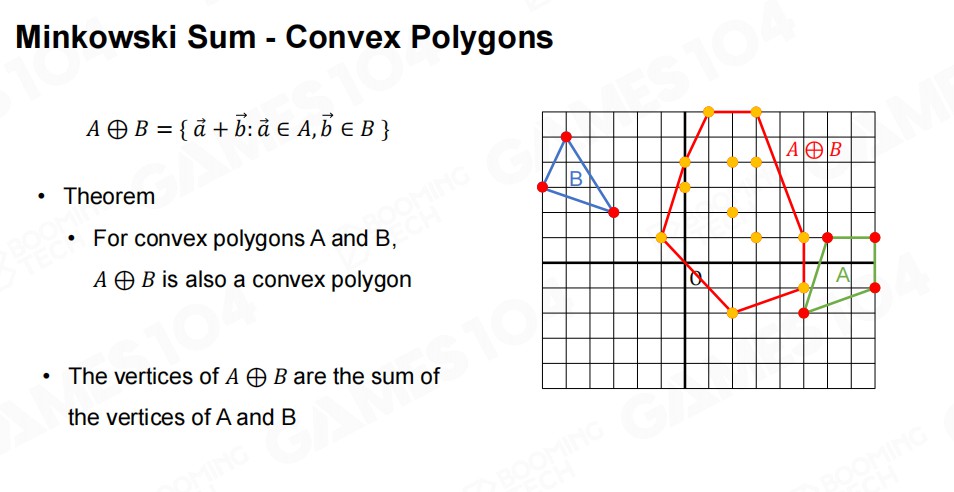
- 一个三角形点集B加了一个三角形点集A,得到新的点集相当于三角形B位移后相对于三角形A进行了一个拖拽而形成了一个凸包
![pF1FPiT.jpg]()
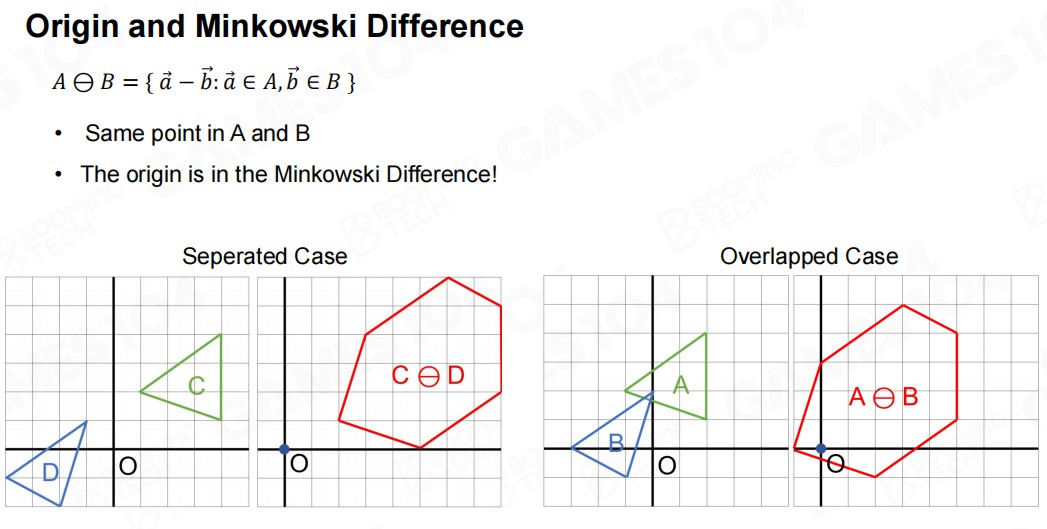
点A减去三角形点集B,相当于A+(-B)
如果两个三角形点集有交点的话,那么他们相减得到的凸包点集一定会过原点,反之亦然
![pF1Fkz4.jpg]()
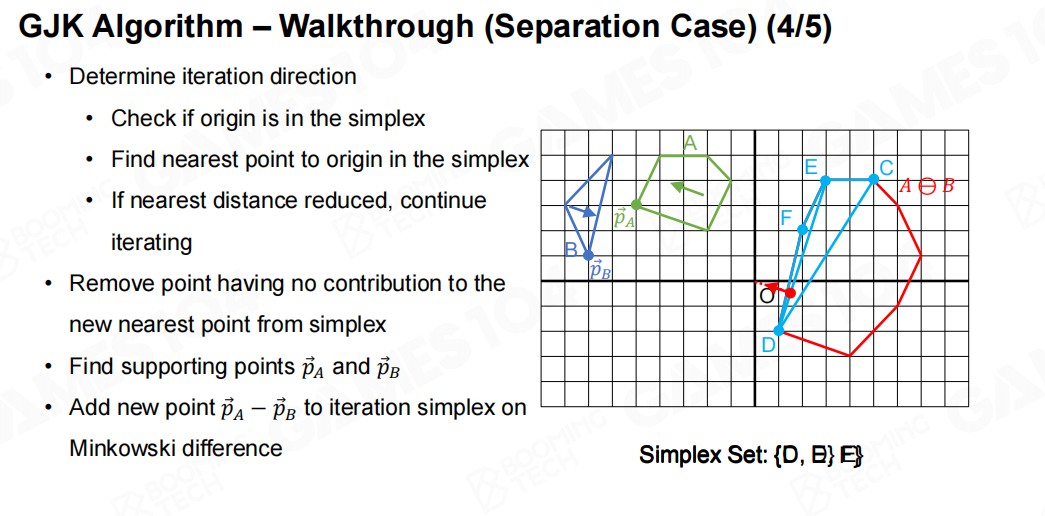
GJK Algorithm-Walkthrough
将两个凸包求交问题转换为一个凸包是否过原点问题
从A、B中选一个相反的方向,相减能得到凸包的一个顶点C
从顶点连接原点,从这个方向再从AB找两个顶点,获得凸包上一个点D
然后从CD垂直方向继续重复上面的方法,直到得到最后一个三角形CEF,若还没有找到原点,就说明不相交
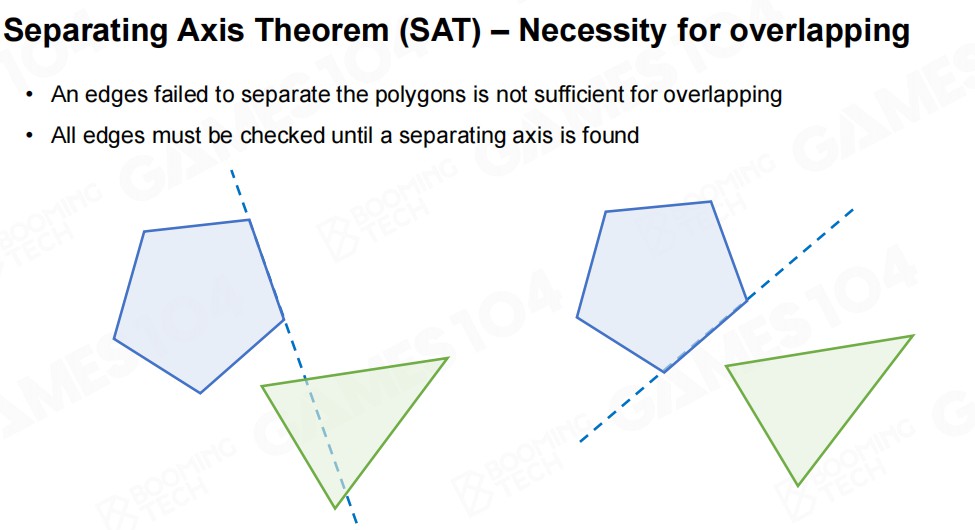
Separating Axis Theorem(SAT)-Convexity
分离轴定律
判断两个凸多面体是否相交,如果两个没有相交,一定可以找到一个轴,使得两个凸多面体的投影被轴分开
![pF1FiJU.jpg]()
所有的边都要找一遍
在三维case下,不仅要每个面检测,还要检测每一条边
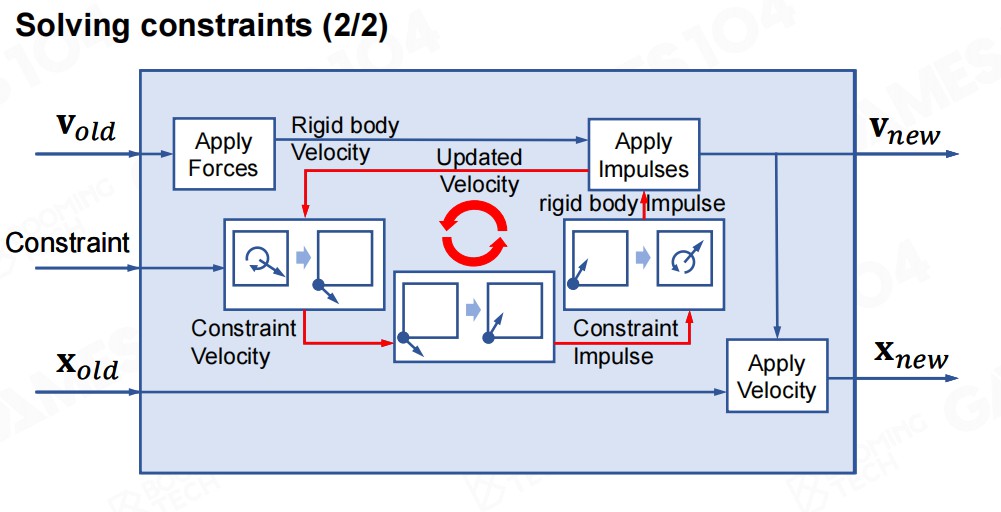
Collision Resolution
在一些碰撞检测后,如何将碰撞的物体分开,是需要解决的问题
Applying Panalty Force:给物体添加力
constraints:约束,当发生碰撞时,给小冲量,然后使用拉格朗日约束进行迭代,迭代冲量
Scene Query
Ray Cast
Mutiple hits:一条射线出去,返回所有穿过的排序好的object
Closest hit:最近的
Any hit:返回所有穿过的不用排序的object
Sweep
- 一个体横扫过去

Overlap
- 给一个shape,问在世界中有没有物体跟这个形状发生了碰撞
Efficiency, Accuracy, and Determinism
Simulation Optimization
- island:将世界分成一个个的island
- sleep:如果一个地方的物体长时间不会动,那么在外力作用前会使其sleep
Continuous Collidion Detection(CCD)
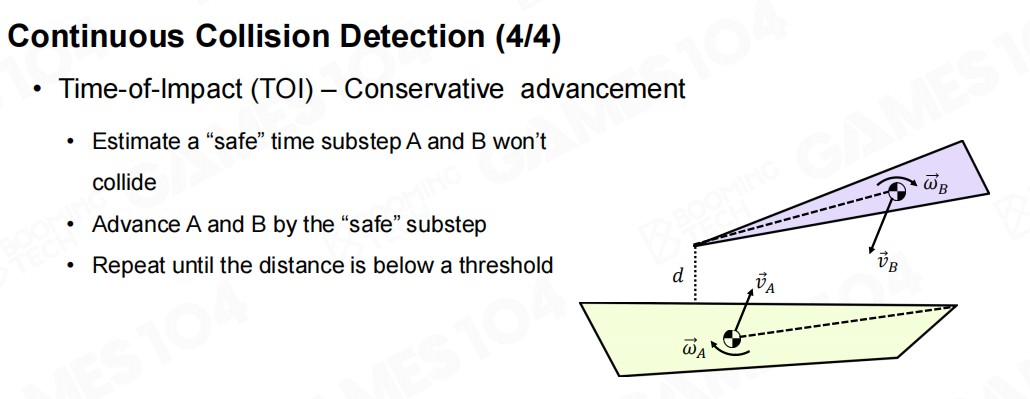
连续碰撞检测
解决穿墙问题,物体速度太快,墙体太薄导致穿墙
把墙做厚一点
CCD方法:做一个保守估计,即物体和环境碰撞的一个安全距离是多少,在安全距离外可以任意移动,在安全距离内就会把substep调密,做更精细的检测
Deterministic Simulation
确定性模拟
也就是说对物理的模拟,相同的操作结果相同(为了使得联网游戏中每个玩家看到的世界相同)
requirement
希望不同的终端,物理模拟的步长是一致的(如每秒是60帧)
确定性的模拟顺序
浮点数的稳定性