Pinhole Image Formation
针孔相机没有深度,每个地方都是清晰的,看不到虚化的地方
光线追踪的时候用的就是针孔摄像机的原理,所以就没有景深的效果
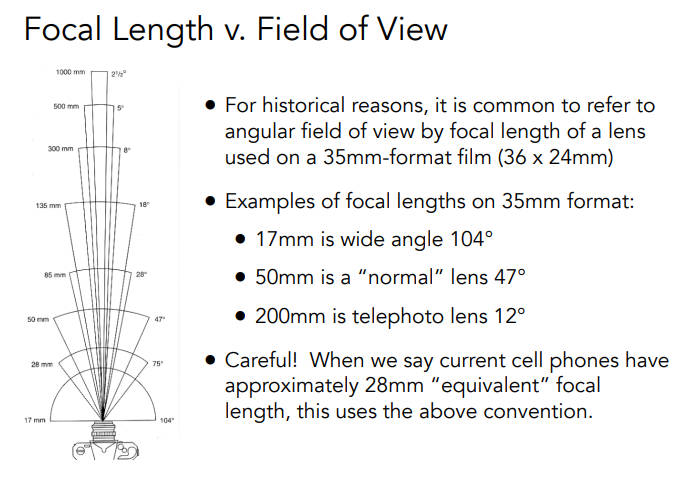
Field of View(FOV) 视场
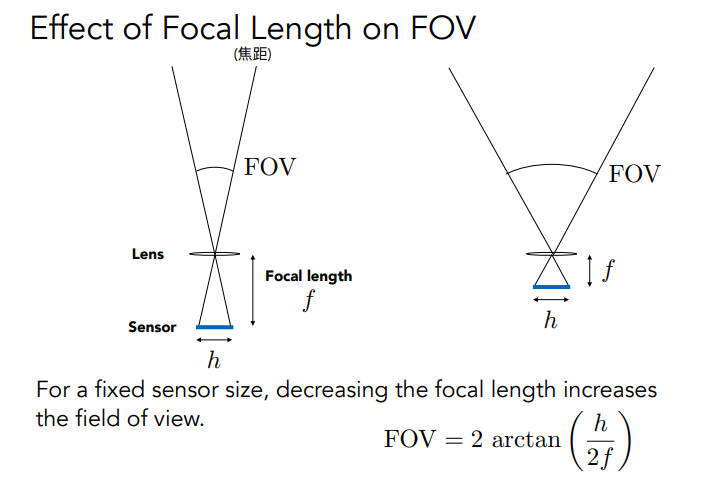
Effect of Focal Length on FOV
fov和传感器大小和焦距有关,但默认传感器是有一个固定的大小,也就是说焦距是按照35mm的胶片(film)(也可以说是传感器)去定义的,其实传感器可能大小不同,但焦距都是按35mm的胶片去定义的
更长的焦距对应更小更远的视场
Effect of Sensor Size on FOV
更大的传感器,对应更大更近的视场
传感器sensor和胶片film区分:
sensor吸收irradiance
film用来决定最后存成什么样的格式
Exposure
H = T * E
Exposure(H)= time(T) * irradiance(E)
快门控制进光时间
光圈大小和焦距会影响到irradiance
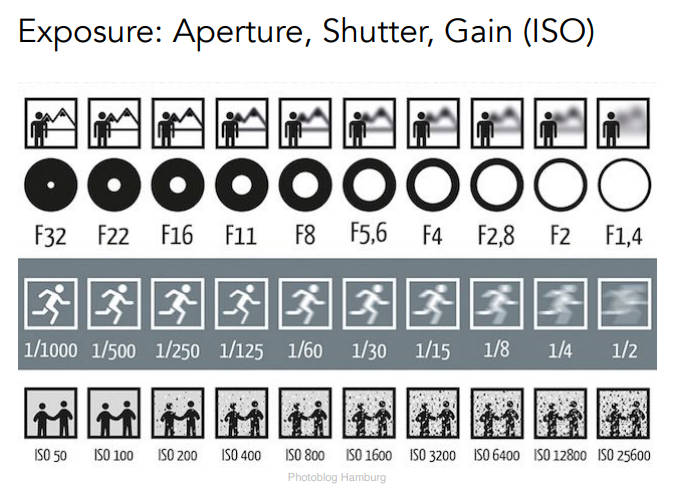
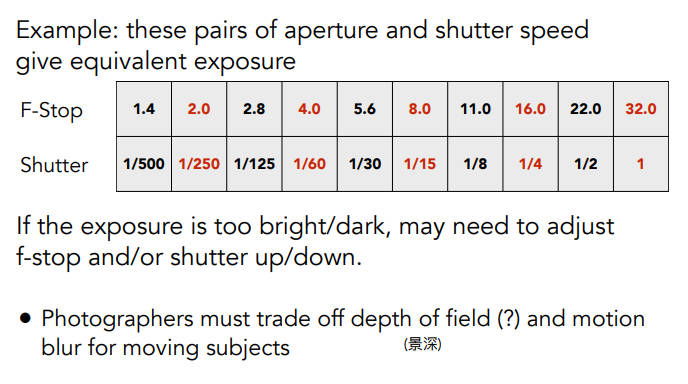
Exposure Controls
Aperture size光圈大小:改变光圈大小来改变f-stop
Shutter Speed快门速度:改变快门速度来改变感光时间
ISO gain感光度:后期处理,增加最后图片的曝光,可以调整硬件也可以调整软件,简单放大信号会同时放大噪声
为什么会有噪声,感光时间不足,光子就不足,就会产生noise
ISO
- 线性增加
F-Number(F-Stop)
- 不正式的理解:F数是光圈直径的倒数
Side Effect Shutter Speed
会产生运动模糊
Rolling shutter:对于超级高速的东西产生扭曲
Constant Exposure: F-Stop vs Shutter Speed
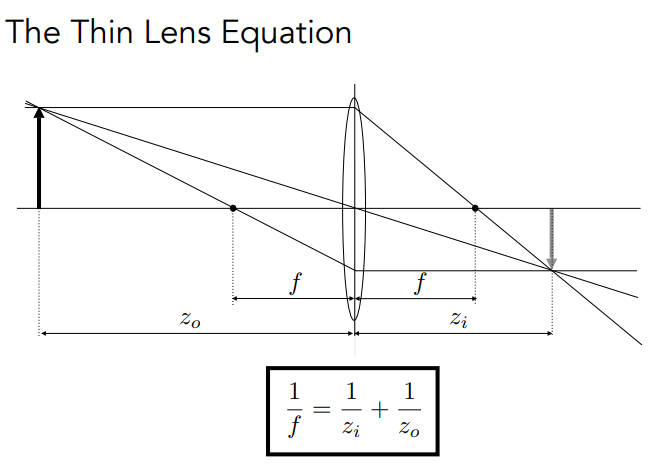
Thin Lens Approximation
薄透镜近似
使用透镜组来成像
实际的透镜很复杂,不一定理想
我们考虑的是理想化的透镜
基本假设:
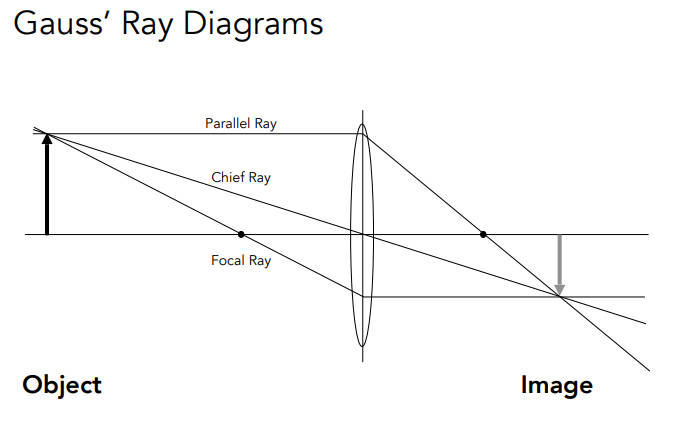
平行光穿过透镜交于焦点
过焦点的光穿过透镜会平行
焦距可以修改(通过透镜组)
穿过透镜中心的光线,方向不会改变
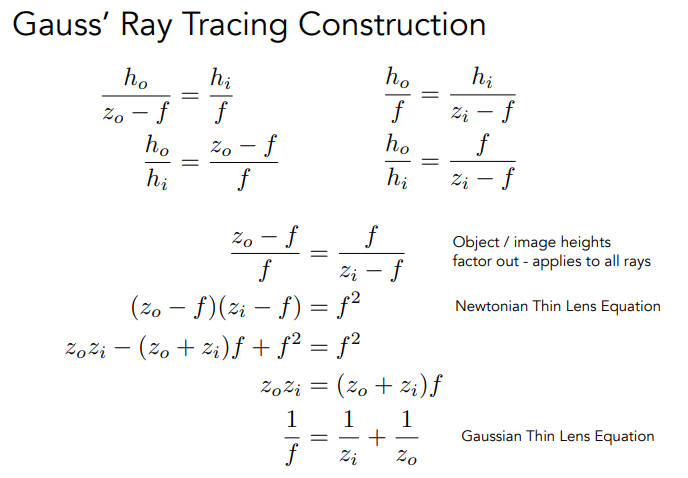
焦距的倒数 = 相距的倒数 + 物距的倒数,也就是对于一个固定焦距的透镜来说,改变物距相距也一定会跟着改
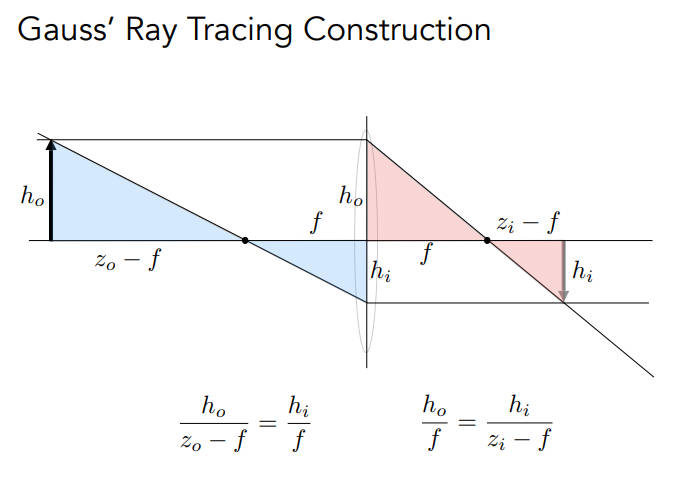
通过相似三角形来获得上述的关系
这个叫高斯定理,也叫薄透镜的定理
Defocus Blur
- 和景深有关系了
Computing Circle of Confusion(CoC)
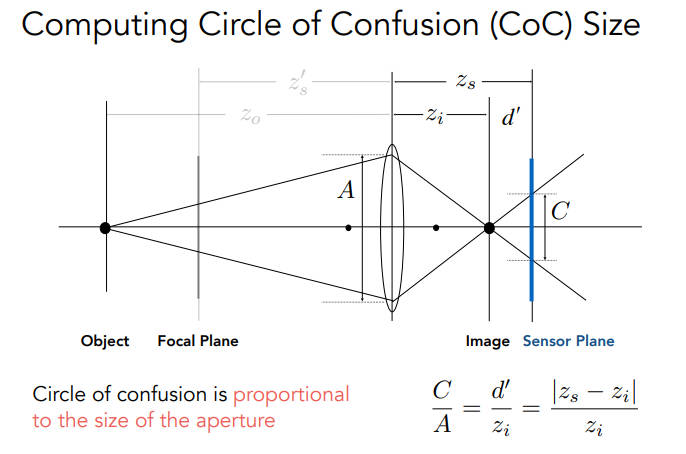
物体的一个点根据薄透镜的定理,会成像到一个点,但是感光sensor Plane比那个成像点远的话,就会打成一片,也就成了一个圆
如果其他都确定了,那么这个C和A(aperture)有关
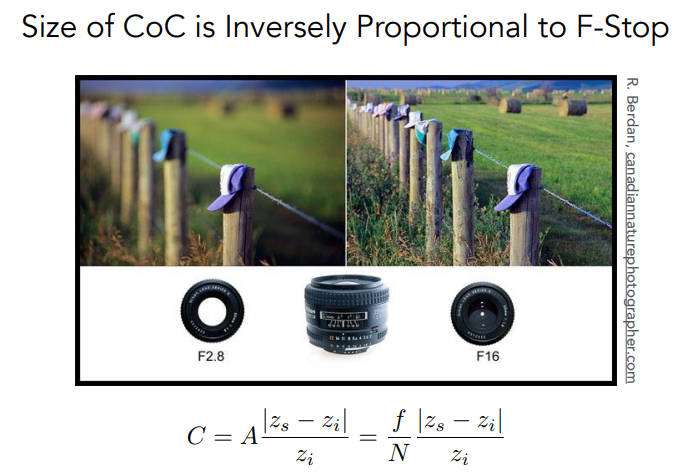
CoC和光圈大小成正比
所以大光圈就会有更模糊的效果
F数=焦距除以光圈的直径
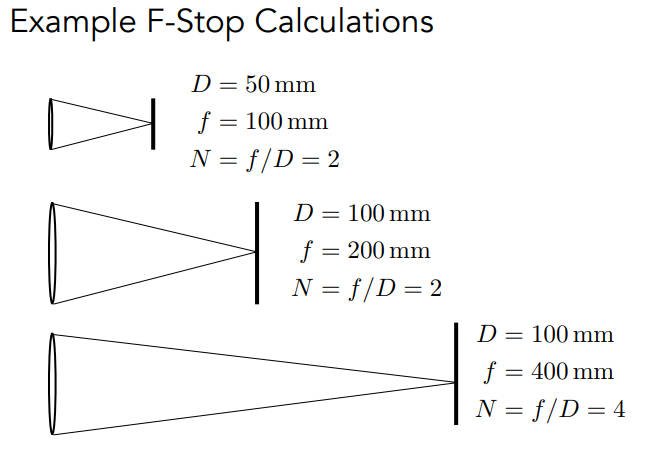
- N = f/A
Ray Tracing Ideal Thin Lenses
- 就是在ray tracing中模拟透镜的模糊效果
Ray Tracing for Defocus Blur(Thin Lens)
- 首先定义感光器大小、透镜焦距、透镜大小
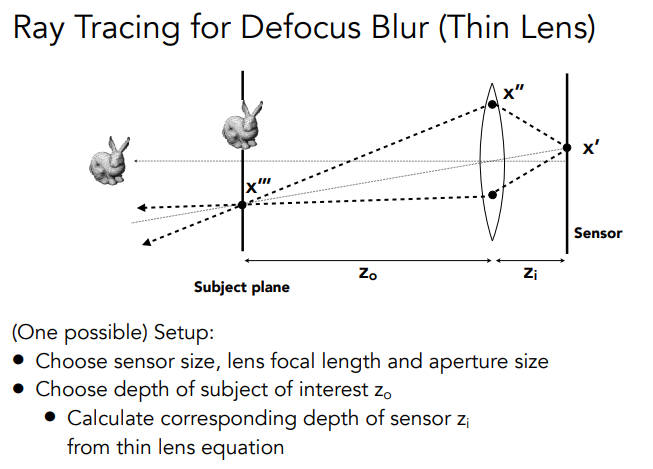
选择将透镜放在一个距离重拍摄平面Z0远的地方,也就是物距Z0
自然可以计算出像距Zi,也就是sensor距离透镜的距离
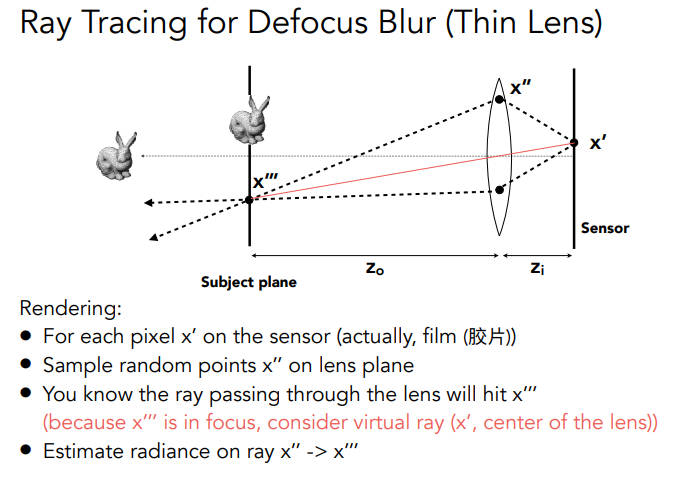
也就是下面$x\prime$点来自于$x\prime\prime -> x\prime\prime\prime$打的光线,交于着色点
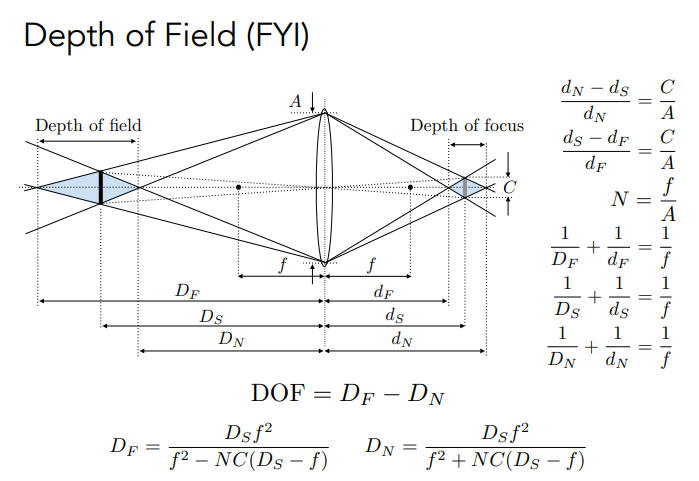
Depth of Field
- 模糊是有一个范围
Circle of Confusion for Depth of Field
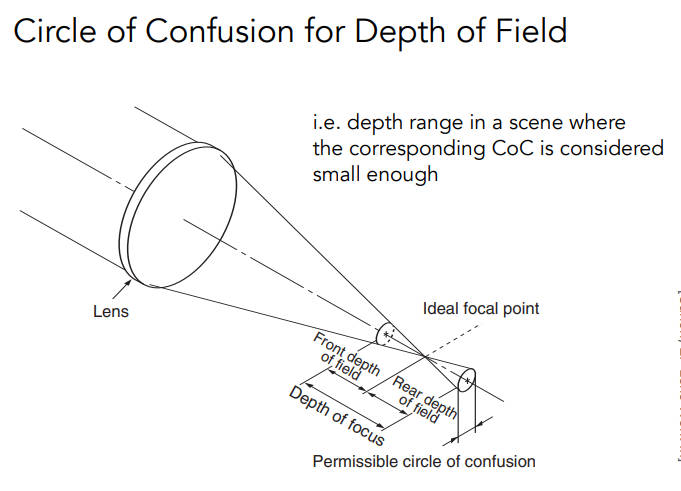
景深就是指在实际的场景中有一段深度,这段深度在经过透镜后,会在成像平面附近形成一个区域,在这块区域,我们认为,产生的CoC都是足够小的
可以通过公式将那个DoF解出来