Why Ray Tracing
光栅化不能解决全局的效果
软阴影
Glossy reflection(光泽度反射)(打磨的比较光滑的金属,类似古代的铜镜)
间接光照
光追准确但很慢
- 光栅化:实时;光追:离线(一帧需要一万个gpu小时)
Basic Ray-Tracing Algorithm
Light Rays(假设的条件)
光线沿着直线传播
光线和光线不会发生碰撞
光线从光源发射最后弹到眼睛里,而且光路可逆
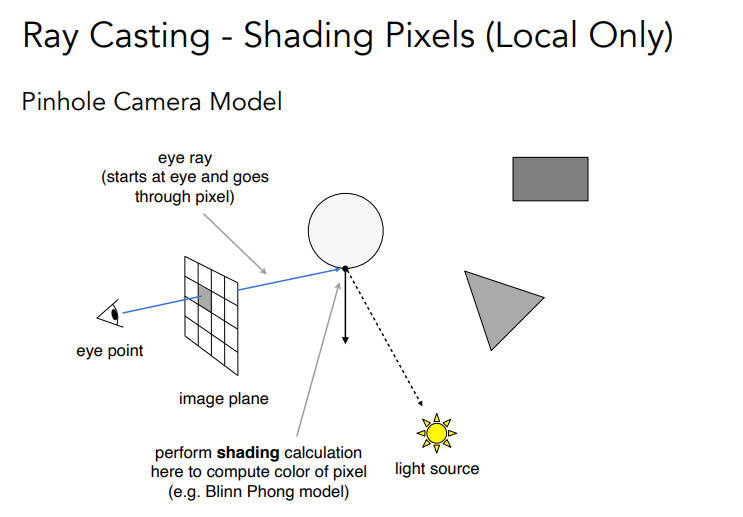
Ray Casting
通过从摄像机投射每一个像素来生成一张图
检查投射到的物体上的点,连接光源,判断是不是在阴影
- 其实这种效果和光栅化很相似,并没有弹射,只是不需要z-buffer了
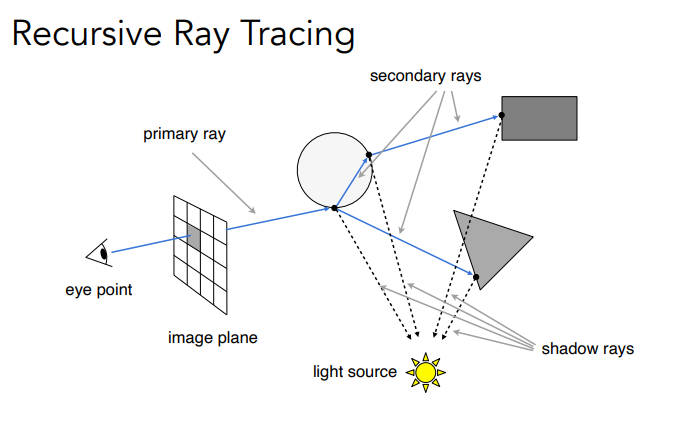
Recursive(Whitted-Style)Ray Tracing
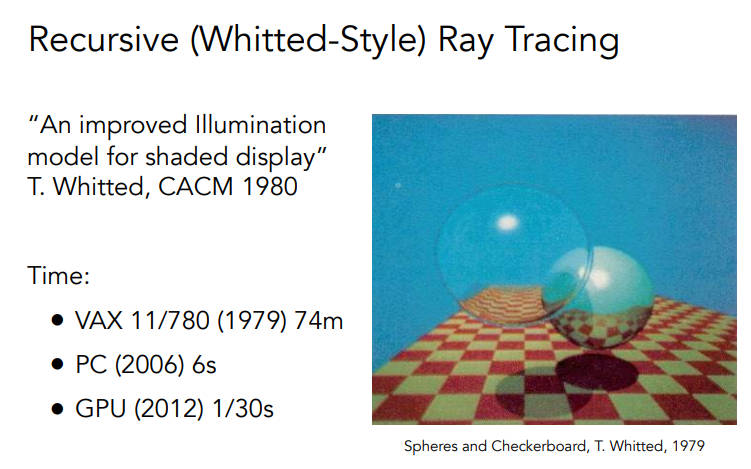
可以进行多次弹射(反射、折射)
在每一个弹射的点都与光源连接,判断是不是在阴影,然后把不在阴影的颜色加起来
弹射的过程有能量损失,不然就过曝了
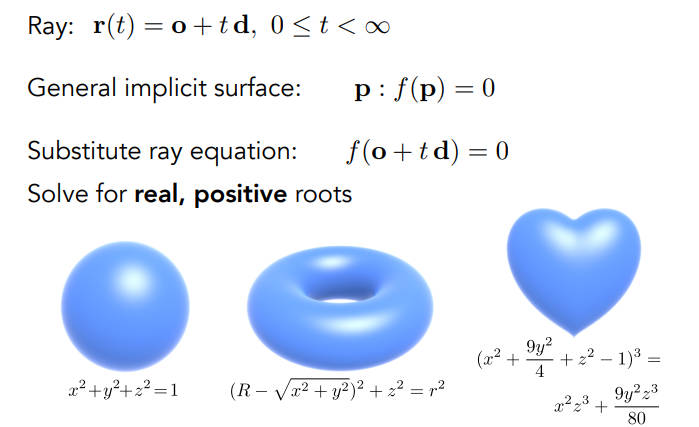
Ray-Surface Intersection
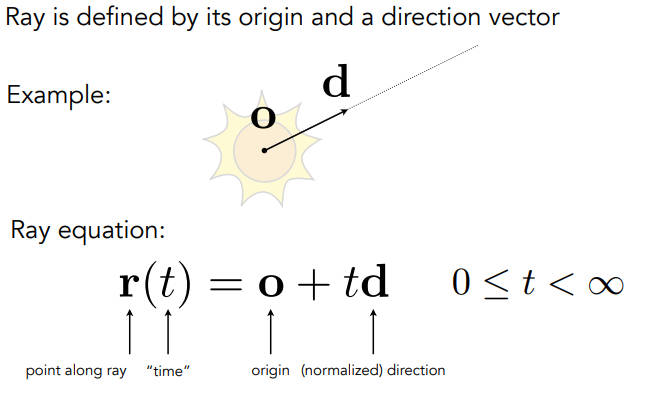
Ray Equation
光线就是光源+一个方向向量
光线r在t时间从一个起点到一个方向的位置
Ray Intersection With Sphere(Implicit Surface)
点p是球上一点满足
o+td,求t(二次函数)需要满足实际意义,所以t得是正的,而且是个实数
相交时,要取更近的,取更小的t
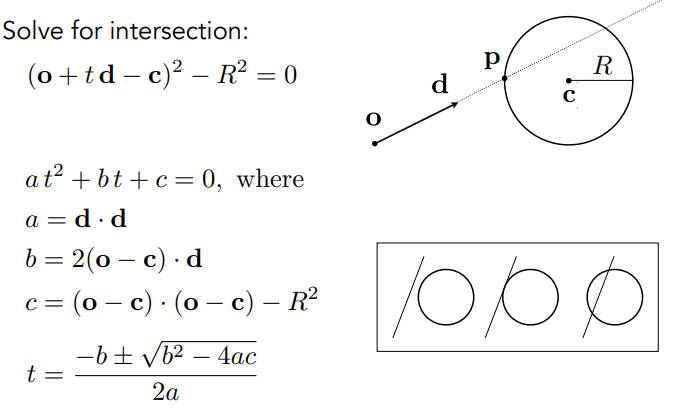
- 按这个方法,隐式表面就很好算了
Ray Intersection With Triangle Mesh(emplicit Surface)
可以判断一个点在物体内还是物体外,从点开始往任意一个方向发射一根射线,如果与物体的交点是奇数个,那么就说明在物体内(物体得是封闭的)
最普通的方法是遍历物体所有的三角形,来看看到底和哪个三角形相交了,找出最近的点,但速度会非常慢
那么如何计算和三角形的交点,分解成两个问题:
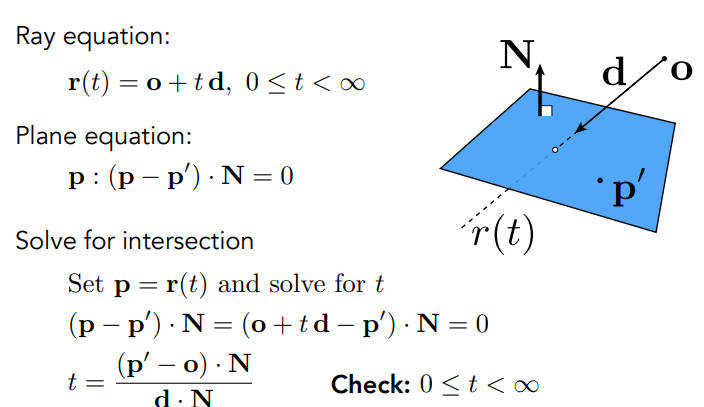
光线和平面求交(根据三角形的属性计算出三角形所在的平面)
找到交点后判断是否在三角形内
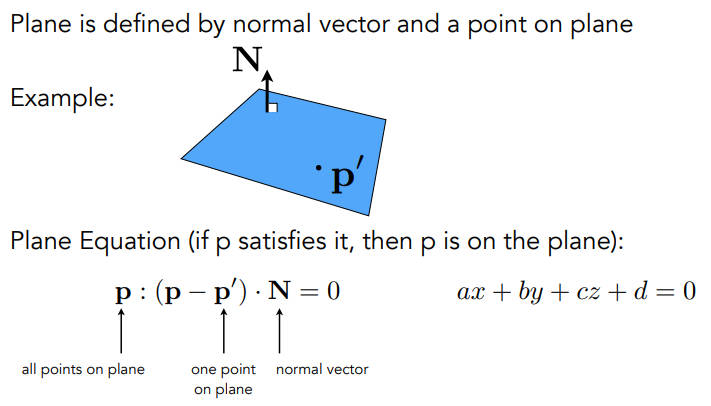
平面被定义为一个方向(法线)和一个点,满足下图公式的点p,就在平面上,平面就是一些列p点的集合
Moller Trumbore Algorithm
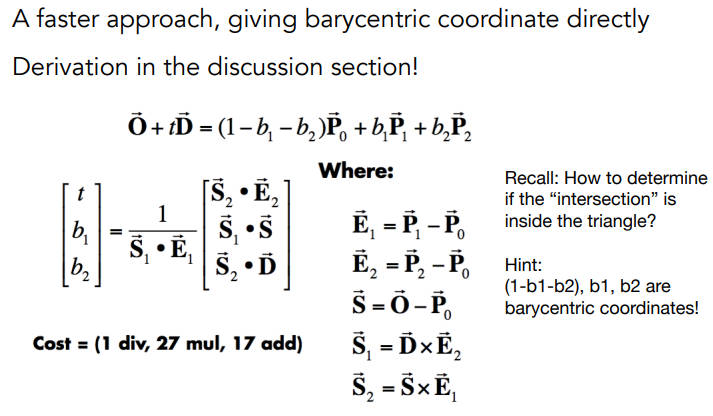
在上述式子中,右侧是使用重心坐标求得三角形p0p1p2平面的一个点,左侧是光线要交的点,只要通过式子求出t即可,那么点都是三维的,所以就是三个方程三个未知量(t、b1、b2)
解出b1、b2、1-b1-b2都是非负的,那就在三角形内
这样就可以直接求出光线是否和三角形有交点,但实际上本质还是先看是不是交在了三角形所在的平面上
Accelerating Ray-Surface Intersection
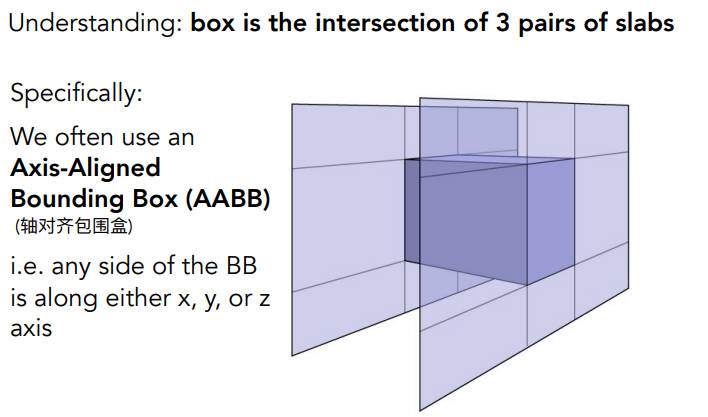
Bouding Volumes(包围体积)
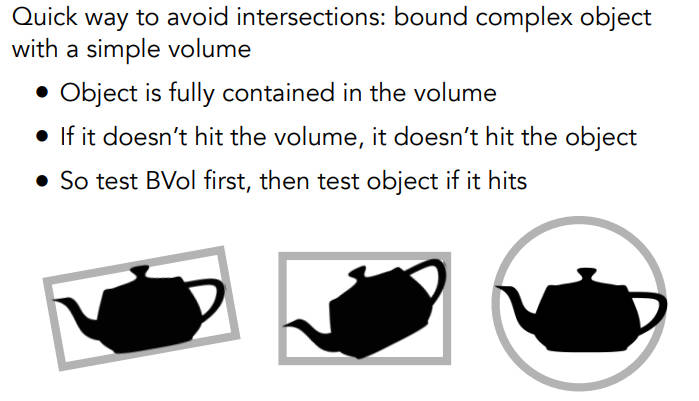
逻辑:如果光线和包围盒都不相交,那么更不可能和里面的物体相交
包围盒:三个对面形成的交集
长方体的每个轴沿着坐标轴,叫轴对齐包围盒
先把情况降维,算光线和二维的BB相交的情况
首先算和两条个平面的两个交点对应的tmin和tmax,再算出和两个y平面的交点所对应的tmin和tmax,然后求个交集,也就得到了光线穿过BB时的tmin和tmax
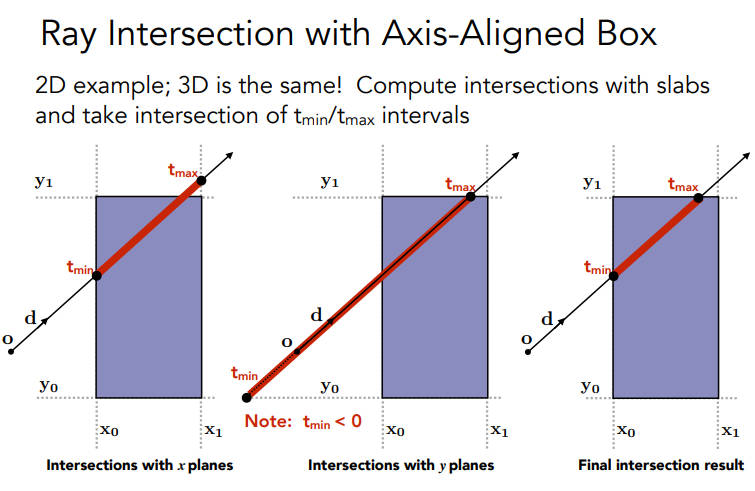
那么对于三维的BB来说,只有:
当光线进入三对面时才算进入了BB
当光线只要退出了一对面就算出了BB
先计算光线对于每一对面的$t_{min}$和$t_{max}$
$t_{enter} = max{t_{min}},t_{exit} = min{t_{max}}$
如果$t_{enter}<t_{exit}$,那么说明光线在这个BB里存在了一段时间,反之则没有穿过BB
如果$t_{exit}<0$,说明盒子一定在光线的背后
如果$t_{exit}>=0$且$t_{enter}<0$,说明光线的起点在盒子中
总之,光线和AABB相交当且仅当$t_{enter}<t_{exit} \&\& t_{exit}>=0$
为什么要axis-aligned呢
- 为了使计算相对容易
作业5
题目要求:
- 在这部分的课程中,我们将专注于使用光线追踪来渲染图像。在光线追踪中
最重要的操作之一就是找到光线与物体的交点。一旦找到光线与物体的交点,就
可以执行着色并返回像素颜色。在这次作业中,我们需要实现两个部分:光线的
生成和光线与三角的相交。本次代码框架的工作流程为:
- 从 main 函数开始。我们定义场景的参数,添加物体(球体或三角形)到场景
中,并设置其材质,然后将光源添加到场景中。
- 调用 Render(scene) 函数。在遍历所有像素的循环里,生成对应的光线并将
返回的颜色保存在帧缓冲区(framebuffer)中。在渲染过程结束后,帧缓冲
区中的信息将被保存为图像。
- 在生成像素对应的光线后,我们调用 CastRay 函数,该函数调用 trace 来
查询光线与场景中最近的对象的交点。
- 然后,我们在此交点执行着色。我们设置了三种不同的着色情况,并且已经
为你提供了代码。
你需要修改的函数是:
- Renderer.cpp 中的 Render():这里你需要为每个像素生成一条对应的光
线,然后调用函数 castRay() 来得到颜色,最后将颜色存储在帧缓冲区的相
应像素中。
- Triangle.hpp 中的 rayTriangleIntersect(): v0, v1, v2 是三角形的三个
顶点,orig 是光线的起点,dir 是光线单位化的方向向量。tnear, u, v 是你需
要使用我们课上推导的 Moller-Trumbore 算法来更新的参数。
第一,是第一个生成光线,这个需要找到每个像素的世界坐标,而这个过程是从像素坐标->NDC坐标->Screen坐标->世界坐标,在课程中并没有详细地讲,但其实在光栅化的时候说过。可是我还是不清楚,所以参考了博客光线追踪:生成相机光线 (scratchapixel.com)
只需要在Render函数的注释下面算出dir的x和y即可
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
for (int j = 0; j < scene.height; ++j)
{
for (int i = 0; i < scene.width; ++i)
{
// generate primary ray direction
float x;
float y;
// TODO: Find the x and y positions of the current pixel to get the direction
// vector that passes through it.
// Also, don't forget to multiply both of them with the variable *scale*, and
// x (horizontal) variable with the *imageAspectRatio*
//这个地方的细节在课程中并没有提及,所以还是得查
//目标是将屏幕上的像素转换为世界坐标中
//首先先将像素转换到NDC空间中
x = ((float)i + 0.5f) / scene.width;
y = ((float)j + 0.5f) / scene.height;
//再将x,y转换到screen空间中
x = 2 * x - 1.f;
y = -(2 * y - 1.f);//y轴方向向下,所以取个负值
//然后现在的坐标是在正方形中的坐标,要根据宽高比拉伸一下
x *= imageAspectRatio;
//最后是计算在世界坐标系中的像素坐标,其实应该乘以相机到平面的距离,但是默认都是1,所以不用乘
x *= scale;
y *= scale;
Vector3f dir = Vector3f(x, y, -1); // Don't forget to normalize this direction!
dir = normalize(dir);
framebuffer[m++] = castRay(eye_pos, dir, scene, 0);
}
UpdateProgress(j / (float)scene.height);
}
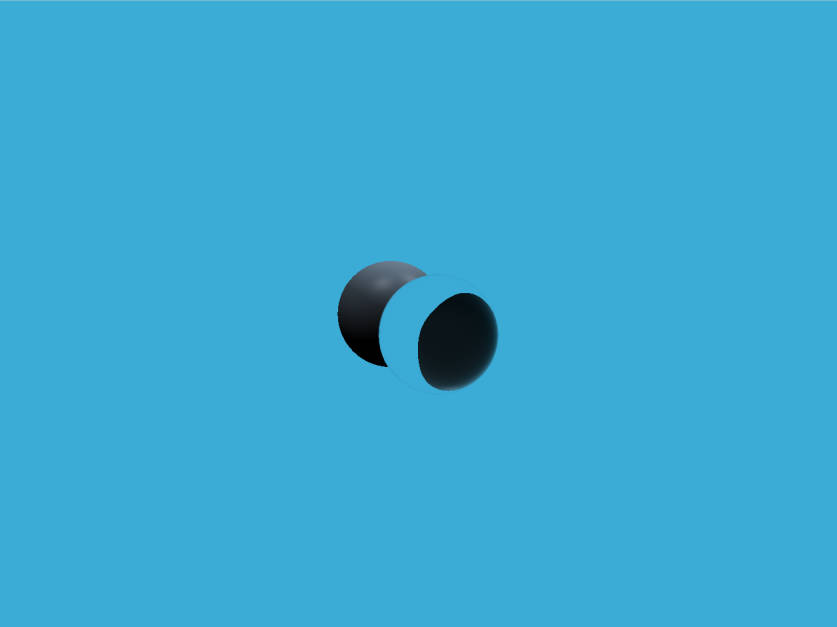
- 此时,生成的图片是有两个球体的:
- 第二,也就是通过Moller-Trumbore 算法来计算值,这个在课程有讲,所以直接套公式就行,其中算出来的t就是函数中的形参tnear,b1就是函数中的形参u,b2是函数中的形参v
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
bool rayTriangleIntersect(const Vector3f& v0, const Vector3f& v1, const Vector3f& v2, const Vector3f& orig,
const Vector3f& dir, float& tnear, float& u, float& v)
{
// TODO: Implement this function that tests whether the triangle
// that's specified bt v0, v1 and v2 intersects with the ray (whose
// origin is *orig* and direction is *dir*)
// Also don't forget to update tnear, u and v.
Vector3f e1 = v1 - v0;
Vector3f e2 = v2 - v0;
Vector3f s = orig - v0;
Vector3f s1 = crossProduct(dir, e2);
Vector3f s2 = crossProduct(s, e1);
tnear = (1 / dotProduct(s1, e1)) * dotProduct(s2, e2);
u = (1 / dotProduct(s1, e1)) * dotProduct(s1, s);
v = (1 / dotProduct(s1, e1)) * dotProduct(s2, dir);
if (u > 0 && v > 0 && u + v < 1 && tnear > 0)
{
return true;
}
return false;
}
- 在做的时候,我把更新tnear、u、v放在了检测出射线和三角形相交的代码块中,导致图片中地面的颜色是黑色的,实际上每次都应该更新,因为这个光线(也就是primary ray)没有打到三角形(也就是平面)的话,应该是有颜色的,如果不更新uv,就无法正常计算颜色了